鼓马机器人技术进展:视觉端到端 RL 技术,实现复杂地形自主移动
2026-01-07
0浏览
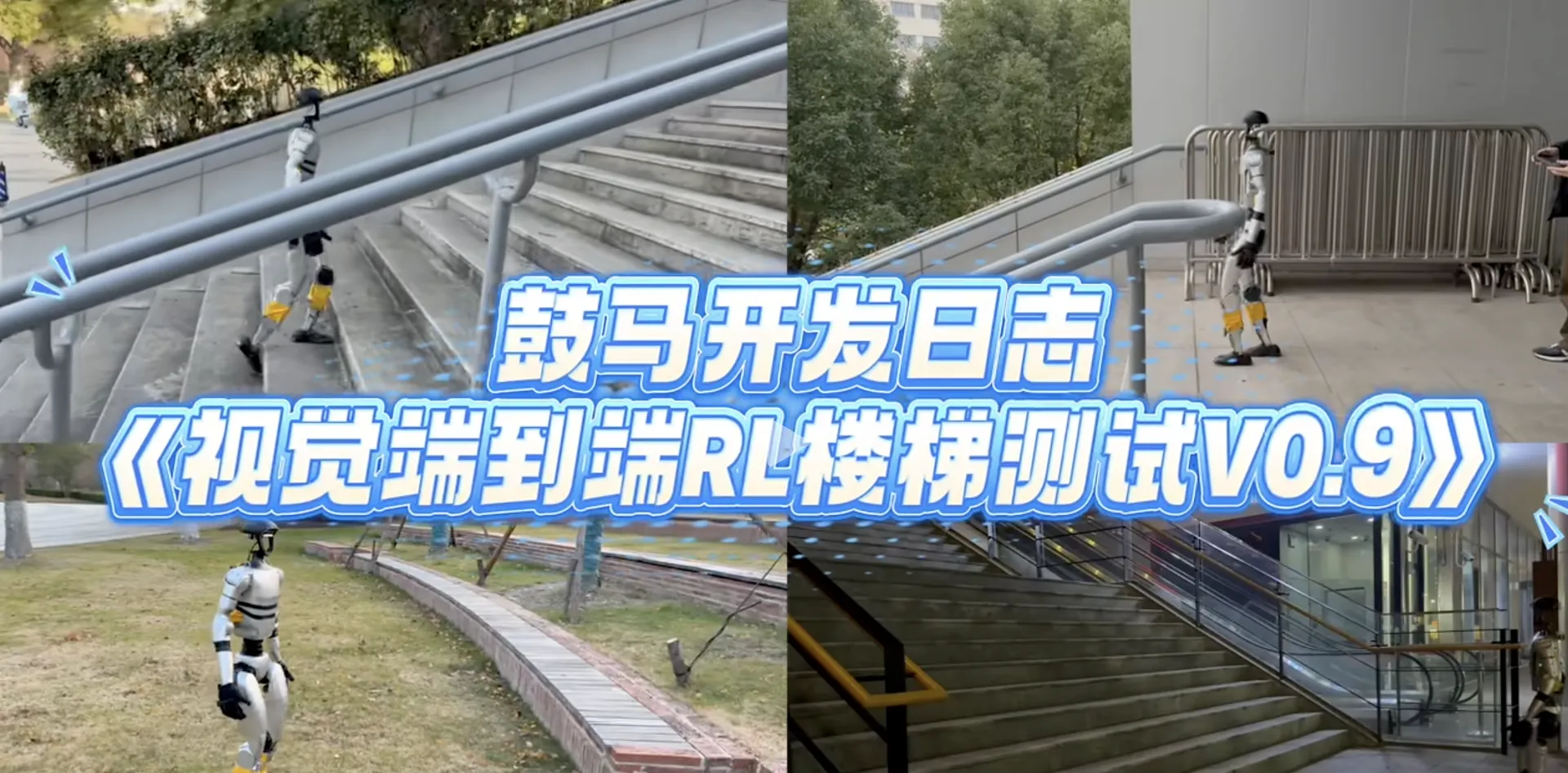
近日,鼓马机器人完成视觉端到端强化学习(RL)楼梯测试 V0.9,在常规楼梯、多地形融合、夜间环境等场景下,实现了稳定的自主移动,标志着鼓马在人形机器人 “复杂环境适配” 领域取得关键进展。
一、技术核心:视觉 + 强化学习的 “自主移动方案”
- 视觉感知层:采用高分辨率深度相机 + 全景视觉传感器,实时采集地形、光线、障碍物等环境数据,识别精度达 99.2%;
- 强化学习层:基于端到端 RL 算法,通过百万次模拟训练,让机器人自主学习 “步幅调整、重心控制、地形适配” 逻辑,可应对 ±15° 斜坡、不同宽度楼梯等复杂场景;
- 动态平衡层:结合伺服电机力矩反馈,实时修正落脚力度,确保移动过程中重心稳定,测试中无一次倾倒或卡顿。
二、测试场景:覆盖真实生活的 “移动挑战”
- 常规楼梯场景:完成室内外不同高度台阶的上下移动,步幅适配误差<2cm;
- 多地形融合场景:实现 “平地 - 台阶 - 斜坡” 的无缝切换,地形识别响应时间≤0.5 秒;
- 夜间环境场景:在低光(照度<50lux)条件下,通过轮廓识别 + 光线补偿算法,保持移动稳定性。
三、技术价值:为人形机器人落地生活场景铺路
本次测试的技术突破,让鼓马机器人具备了 “自主适应复杂室内外环境” 的能力,可直接应用于商场导览、景区服务、楼宇配送等需要跨楼层移动的场景,进一步缩小了人形机器人与 “实用化生活服务” 的距离。
未来,鼓马将持续优化视觉 RL 技术,拓展更复杂的地形适配能力(如台阶缝隙、湿滑路面),推动人形机器人真正走进日常生活。